![]()
![]()
![]()
Next: Bibliography
Up: Partitioned Steiner 5-Designs
Previous: Subgroups of order up
Invariants
Each of the stabilizers of order 6 acts transitively on any invariant 6-set
If a group acts ![]() -transitive then any
-transitive then any ![]() -element sequence of pairwise different
elements can be mapped onto any other such sequence by some group element.
If the stabilizer of a sequence
-element sequence of pairwise different
elements can be mapped onto any other such sequence by some group element.
If the stabilizer of a sequence ![]() acts trivially then already the sequence of the
image points of
acts trivially then already the sequence of the
image points of ![]() determines the image points of all other points.
determines the image points of all other points.
To see this assume there would be different image points for some element ![]() .
That would mean that there are two group elements
.
That would mean that there are two group elements ![]() such that
such that
![]() but
but
![]() . Then
. Then ![]() fixes each element of
fixes each element of ![]() and thus should be trivial by assumption. But then
and thus should be trivial by assumption. But then ![]() also fixes
also fixes ![]() .
.
Any sequence of pairwise different entries of length bigger than ![]() can be truncated after the first three entries. This is a projection
that is compatible with the group action. So, two longer sequences
with identical starting sequence
can be truncated after the first three entries. This is a projection
that is compatible with the group action. So, two longer sequences
with identical starting sequence ![]() of length
of length ![]() are in the same orbit
only if some element in the stabilizer of the first
are in the same orbit
only if some element in the stabilizer of the first ![]() elements maps
one onto the other. If the stabilizer is trivial all these sequences
lie in pairwise different orbits. This strategy of using mappings that are compatible with the group action
to simplify the problem is called homomorphism principle [14], [16].
We have already used this approach in Lemma 4 where the homomorphism of group actions
is the assignment of the stabilizer to its k-set.
elements maps
one onto the other. If the stabilizer is trivial all these sequences
lie in pairwise different orbits. This strategy of using mappings that are compatible with the group action
to simplify the problem is called homomorphism principle [14], [16].
We have already used this approach in Lemma 4 where the homomorphism of group actions
is the assignment of the stabilizer to its k-set.
If a group is regular on the orbit of ![]() then the orbit of each sequence
then the orbit of each sequence ![]() with starting subsequence
with starting subsequence ![]() can be uniquely described by first applying the
unique group element
can be uniquely described by first applying the
unique group element ![]() that maps the starting sequence onto
that maps the starting sequence onto ![]() to
to ![]() and then using the sequence of the images of remaining points under
and then using the sequence of the images of remaining points under ![]() as an
invarant.
as an
invarant.
A prominent example of this kind is the cross-ratio of geometry.
The group ![]() acts 3-transitive on the projective line
and regular on 3-sequences of pairwise different 1-dimensional subspaces.
By means of linear algebra a matrix can be found mapping one such sequence
onto a given second one. In particular, taking as the first sequence
a standard representative produces invariants.
For any 4-sequence the image of the fourth point after normalizing the first 3-element
sequence uniquely determines the orbit.
acts 3-transitive on the projective line
and regular on 3-sequences of pairwise different 1-dimensional subspaces.
By means of linear algebra a matrix can be found mapping one such sequence
onto a given second one. In particular, taking as the first sequence
a standard representative produces invariants.
For any 4-sequence the image of the fourth point after normalizing the first 3-element
sequence uniquely determines the orbit.
In any subgroup the stabilizer of three points acts
trivially. So, if one first determines each orbit of the subgroup on the 3-sequences
and then uses the image of the fourth point one again has an invariant. We use this for
![]() .
This group is 2-transitive and the stabilizer of two points is transitive on
those points that lie in the same image of the determinant, that is those that are either
all squares or all non-squares.
.
This group is 2-transitive and the stabilizer of two points is transitive on
those points that lie in the same image of the determinant, that is those that are either
all squares or all non-squares.
In this way we can map each sequence of 4 pairwise different points onto a unique
representative of its orbit. We define some ordering on the set of these representatives
and declare the smallest of all representatives from all sequences of
4 pairwise different points of a 5-set ![]() as the representative
of
as the representative
of ![]() .
.
Of course this could be done as well for any ![]() -sets. But for larger
-sets. But for larger ![]() we get
too many 4-sets contained in a
we get
too many 4-sets contained in a ![]() -set. So, for
-set. So, for ![]() and our special goal
of finding Steiner systems we here make use of the following observation.
If a 6-set is contained in an orbit that already occured then the 5-orbits
it covers are already covered by the earlier found representative.
In terms of the Kramer-Mesner matrix that would mean that the column computed
for the new set is identical to an already existing one. So, we omit multiple
columns.
and our special goal
of finding Steiner systems we here make use of the following observation.
If a 6-set is contained in an orbit that already occured then the 5-orbits
it covers are already covered by the earlier found representative.
In terms of the Kramer-Mesner matrix that would mean that the column computed
for the new set is identical to an already existing one. So, we omit multiple
columns.
There are cases where 6-sets from different orbits produce identical columns
of the Kramer-Mesner matrix. But if we look for Steiner systems we can use at
most one of two such columns. So, we could store for each column the multiplicity
of its occurrence and then multiply each solution with the factors of all columns
belonging to that solution. This would allow to count the complete number of solutions.
Then the number of isomorphism types is just half of the number of solutions
by [16]. This has not yet been implemented.
We work out the computation.
Take ![]() and
and ![]() as the representatives of the sequences of two 1-dimensional
subspaces. Then given any two subspaces
as the representatives of the sequences of two 1-dimensional
subspaces. Then given any two subspaces ![]() and
and ![]() or
or ![]() we can determine a
matrix mapping the given sequence onto the sequence of representatives.
we can determine a
matrix mapping the given sequence onto the sequence of representatives.
The matrix

maps
The matrix

maps
The matrix

maps
So, in each case we know the matrix ![]() transforming a given sequence of two
1-dimensional subspaces onto the standard basis. We have chosen the matrices so that
the determinant
transforming a given sequence of two
1-dimensional subspaces onto the standard basis. We have chosen the matrices so that
the determinant ![]() is a square modulo
is a square modulo ![]() .
.
The matrix ![]() can be applied to all entries of a 4-sequence such that the first two
members are mapped onto
can be applied to all entries of a 4-sequence such that the first two
members are mapped onto ![]() and
and ![]() .
So, in a first step, the sequences are normalized in their first two components.
This can be done in constant time.
.
So, in a first step, the sequences are normalized in their first two components.
This can be done in constant time.
We now consider the second step, where the third component is normalized.
The first two components now have to remain unchanged.
The subgroup of all matrices fixing the two subspaces ![]() and
and ![]() consists of the matrices
of the form
consists of the matrices
of the form ![]() where
where ![]() . There are
. There are ![]() such matrices.
Since any matrix that fixes 3 1-dimensional subspaces must fix all 1-dimensional subspaces,
this subgroup acts regularly on the set of subspaces of the form
such matrices.
Since any matrix that fixes 3 1-dimensional subspaces must fix all 1-dimensional subspaces,
this subgroup acts regularly on the set of subspaces of the form ![]() for
for
![]() .
We chose as a representative
.
We chose as a representative ![]() . The matrix
. The matrix
![]() normalizes the third component.
So, there is only one orbit on 3-sequences under
normalizes the third component.
So, there is only one orbit on 3-sequences under
![]() .
.
A sequence
is transformed into normal form by first transforming by
and then by

So, the product of these transformations

sends
The quotient

thus is an invariant of the orbit of the given sequence under
In case of the special linear group the diagonal matrix has to lie in the coset of a matrix with determinant 1
modulo the kernel of the action of ![]() on the set of all 1-dimensional subspaces.
This kernel consists of all matrices of the form
on the set of all 1-dimensional subspaces.
This kernel consists of all matrices of the form

such that their determinant is a square. The squares form a subgroup of index two in the multiplicative group of residues modulo
We now have seen that there are two orbits of PSL(2,p) on the set of
sequences of length 3 with representatives
and
If we apply the matrix

of determinant 1 to the first sequence we obtain a permuted version of the second representatives. This shows that the corresponding 3-element sets of 1-dimensional subspaces are in one orbit. This means that
For our goal of normalizing a given sequence of 1-dimensional subspaces
we, after having transformed the sequence such that the first two
components are normalized, have to multiply with some
![]() where
where ![]() is a square such that we either get
is a square such that we either get
![]() or
or
![]() as the third component.
The first case is just the cross-ratio derived above.
The second one is obtained similarly. It turns out that then
as the third component.
The first case is just the cross-ratio derived above.
The second one is obtained similarly. It turns out that then
![]() is sent to
is sent to
![]() .
So, in this case we have to multiply the cross-ratio by -1.
That allows to use the well known mathematical term of a Legendre symbol.
For
.
So, in this case we have to multiply the cross-ratio by -1.
That allows to use the well known mathematical term of a Legendre symbol.
For ![]() a prime and
a prime and ![]() one has
one has

if

if
Using this invariant, the orbit of a 4-sequence can be
determined in constant time.
Now we have achieved a sequence of the form
or
where
Of course, this can be continued to sequences of length 5 and longer.
We now consider 4-element subsets instead of sequences.
They can be obtained from the sequences by the fusion version
of the homomorphism principle.
A given 4-set ![]() can be arranged as a sequence 24 times.
So, we will get 24 values
of our invariant for
can be arranged as a sequence 24 times.
So, we will get 24 values
of our invariant for ![]() .
Each transformation also transforms
.
Each transformation also transforms ![]() to some
to some ![]() .
The sequences we can form from
.
The sequences we can form from ![]() are in the same orbits
as the sequences we have formed from
are in the same orbits
as the sequences we have formed from ![]() .
So, we don't have to iterate this process.
We can define the set
.
So, we don't have to iterate this process.
We can define the set ![]() coming from the lexicographically smallest
sequence among the 24 sequences as the canonical representative.
We also can use the transformation which transformed the
selected sequence
into canonical form for transforming
coming from the lexicographically smallest
sequence among the 24 sequences as the canonical representative.
We also can use the transformation which transformed the
selected sequence
into canonical form for transforming ![]() into canonical form.
In fact, if we take the 24 sequences of pairwise different points
from
into canonical form.
In fact, if we take the 24 sequences of pairwise different points
from ![]() then by normalizing them we will get back those that we obtained from
then by normalizing them we will get back those that we obtained from ![]() .
This shows that there is a bijection between the set of all 24 values of the
invariant and the selected smallest one.
.
This shows that there is a bijection between the set of all 24 values of the
invariant and the selected smallest one.
Alltogether we have presented a constant time algorithm which computes
for any given 4-element subset the canonical representative of its orbit
and a matrix which does this transformation.
A slight variation should be made when many 4-sets have to be transformed
into canonical form. Then searching each time for a square ![]() such that
such that

where
The stabilizer of ![]() is obtained by taking the transforming elements that
map one sequence onto another one that also lies in
is obtained by taking the transforming elements that
map one sequence onto another one that also lies in ![]() .
The order of the stabilizer is obtained by just the number of transformed sequences
that lie in
.
The order of the stabilizer is obtained by just the number of transformed sequences
that lie in ![]() .
.
From the orbits on 4-sets we can in a further step get the orbits on 5-sets.
If a 5-set ![]() is given, then one can form 5 partitions
is given, then one can form 5 partitions
![]() into a sequence of a 4-set
into a sequence of a 4-set ![]() and the remaining element. Transform
and the remaining element. Transform ![]() by
the same element of
by
the same element of ![]() that maps
that maps ![]() onto its canonical representative
onto its canonical representative ![]() .
Then the stabilizer of
.
Then the stabilizer of ![]() may map the transformed point
may map the transformed point ![]() onto a smaller one.
Choose the smallest one to get a representative on the set of all partitions
of a 5-set into two components of sizes 4 and 1.
onto a smaller one.
Choose the smallest one to get a representative on the set of all partitions
of a 5-set into two components of sizes 4 and 1.
The stabilizer will be trivial in the case where we know in advance that already the
stabilizers of all 5-sets are trivial. So, then we need not compute them in this case.
We will get 5 different orbits of partitions that fuse to the same 5-set. The smallest
of them defines the canonical representative for our 5-set.
The discussion yields the following result.
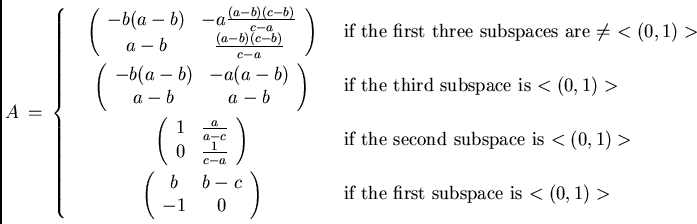
Definition
For a sequence ![]() of 4 pairwise different 1-dimensional subspaces of
of 4 pairwise different 1-dimensional subspaces of ![]() let the cross-ratio
let the cross-ratio ![]() of
of ![]() and the square indicator
and the square indicator ![]() of
of ![]() be defined by the following table.
be defined by the following table.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Theorem
Let ![]() be a sequence of 4 pairwise different 1-dimensional subspaces
of
be a sequence of 4 pairwise different 1-dimensional subspaces
of ![]() .
Then the orbit of
.
Then the orbit of ![]() under
under ![]() is uniquely determined by
is uniquely determined by ![]() .
The sequence
.
The sequence ![]() is transformed into normal form
is transformed into normal form
by the matrix
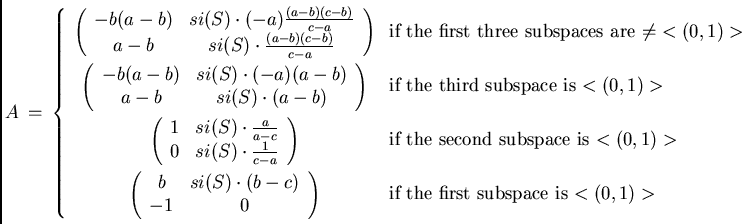
If 4 divides ![]() then the orbit of
then the orbit of ![]() under
under ![]() is uniquely determined by
is uniquely determined by ![]() and
and ![]() .
The sequence
.
The sequence ![]() is transformed into normal form
is transformed into normal form
by the matrix
Using these formulae the time complexity of determining the orbit of a 4-element
sequence of pairwise different 1-dimensional subspaces is dominated by forming
a constant number of arithmetic operations and deciding whether some number
is a quadratic residue modulo ![]() .
The last problem can be solved in time
.
The last problem can be solved in time ![]() using the Gauß reciprocity
formula, [19], by a strategy similar to Euclid's gcd algorithm.
using the Gauß reciprocity
formula, [19], by a strategy similar to Euclid's gcd algorithm.
For a small prime ![]() and many tasks of computing canonical forms it is a better
strategy to first set up tables of squares and of inverses in linear time and then
for each canonical form computation using only constant time.
and many tasks of computing canonical forms it is a better
strategy to first set up tables of squares and of inverses in linear time and then
for each canonical form computation using only constant time.
 .
.
Remarks
The next open case is ![]() .
For prime powers there are further results.
There exist at least
.
For prime powers there are further results.
There exist at least ![]() isomorphism types of
isomorphism types of ![]() -
-![]() designs
with automorphism group
designs
with automorphism group
![]() [5].
[5].
Besides that there exists one ![]() -
-![]() design with automorphism group
design with automorphism group
![]() .
.
Most remarkable are the partitionable Steiner systems consisting of orbits
of the same size.
We have obtained exactly 1 isomorphism type for a prescribed stabilizer ![]() and
and ![]() and exactly 7 isomorphism types
for
and exactly 7 isomorphism types
for ![]() .
.
The next case would be
v = 228:
We would need 280 orbits with stabilizer ![]() or 140 orbits with trivial stabilizer
for a
or 140 orbits with trivial stabilizer
for a ![]() -
-![]() design.
So, we need only half as many orbits if we prescribe a trivial stabilizer
as we need with stabilizer
design.
So, we need only half as many orbits if we prescribe a trivial stabilizer
as we need with stabilizer ![]() .
But there are by far too many orbits with trivial stabilizer to choose the 140 orbits from.
So, it might be easier to prescribe
.
But there are by far too many orbits with trivial stabilizer to choose the 140 orbits from.
So, it might be easier to prescribe ![]() .
.
The total number of ![]() orbits on 6-sets is 32300.
Out of these only 2070 have length
orbits on 6-sets is 32300.
Out of these only 2070 have length
![]() .
The number of 5-orbits is 840. In the Kramer-Mesner Matrix, reduced to these
6-orbits, in each column there are exactly 3 entries 1 and all others are 0.
.
The number of 5-orbits is 840. In the Kramer-Mesner Matrix, reduced to these
6-orbits, in each column there are exactly 3 entries 1 and all others are 0.
The effect of the space reduction by using only a sparse matrix can be seen with ![]() where prescribing stabilizer
where prescribing stabilizer ![]() results in a matrix of
3234 5-orbits by 8028 6-orbits. The full matrix requires 52 MB
while the sparse matrix only needs 0.53 MB.
This problem size is far out of our present reach.
results in a matrix of
3234 5-orbits by 8028 6-orbits. The full matrix requires 52 MB
while the sparse matrix only needs 0.53 MB.
This problem size is far out of our present reach.
Next: Bibliography Up: Partitioned Steiner 5-Designs Previous: Subgroups of order up N.N. 2002-02-25